

A-3.1.4 Georadar
1 Grundlagen
Die folgende Darstellung richtet sich in wesentlichen Teilen nach Knödel et al., 1997 und wurde für die speziellen Belange der Kampfmittelsuche ergänzt.
Das Georadar (Ground Penetrating Radar, GPR) oder Bodenradar ist ein elektromagnetisches Impulsreflexionsverfahren, das auf ähnlichen Grundlagen wie die Reflexionsseismik und die Entfernungsmessung mit Sonar und Radar beruht. Beim Georadar werden mit einer Sendeantenne hochfrequente elektromagnetische Impulse in den Untergrund abgestrahlt und mit einer Empfangsantenne das an Schichtgrenzen und vergrabenen Objekten zurückgeworfene Wellenfeld registriert.
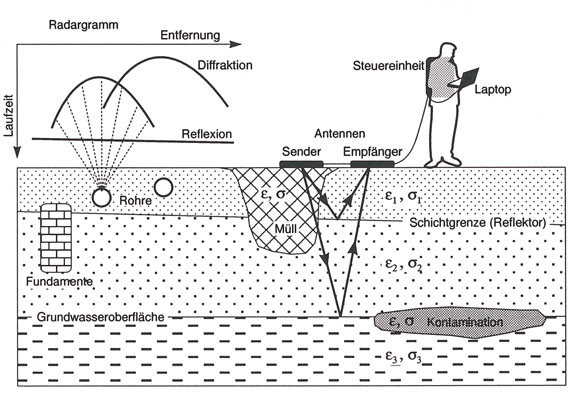
Abb. A-3.1-45: Prinzipschema des Georadars (aus Knödel et al., 1997).
Dabei werden die Laufzeiten und Amplituden der elektrischen Feldstärke dieser Impulse aufgezeichnet.
Reflexionen und Diffraktionen elektromagnetischer Wellen entstehen, wenn im Untergrund stärkere Kontraste in den elektrischen Materialeigenschaften auftreten. Dies betrifft Änderungen der Dielektrizitätskonstanten und der Leitfähigkeit. Die Dielektrizitätskonstante bestimmt die Ausbreitungsgeschwindigkeit der Radarwellen im Untergrund; die Leitfähigkeit die Dämpfung der Radarsignale.
Das Sende- und Empfangssignal wird durch breitbandige Dipolantennen abgestrahlt und empfangen. Die Arbeitsfrequenzen liegen bei geologischen und ingenieurtechnischen Aufgaben etwa im Bereich von 40–1.200 MHz, für Materialprüfungen auch darüber. Die Ankopplung geschieht durch eine starke Änderung der Richtwirkung bei Auflegen oder der Annäherung der Antennen an den Boden. Eine hohe Pulsfolge der Sendesignale ermöglicht quasi kontinuierliche profilhafte Messungen mit bewegter Antennenanordnung (Abb. A-3.1-45). Dabei sind Leistungen bis zu mehreren Kilometern pro Messtag möglich.
Der Vorteil des Verfahrens liegt bei geeigneten Untergrundverhältnissen in der zerstörungsfreien Anwendung mit einer sehr hohen horizontalen und vertikalen Auflösung sowie der Möglichkeit, die Messergebnisse in Echtzeit auf einem Monitor oder Profilschreiber als Radargramm darzustellen. In vielen Fällen ist bereits im Gelände eine vorläufige Interpretation und Aussage zur Aufgabenstellung möglich.
Die Arbeitsfrequenz, die meist als Mittenfrequenz fm eines durch die impulsförmige Anregung erzeugten breitbandigen Signalspektrums angegeben wird, lässt sich je nach der Aufgabenstellung und den Eigenschaften des Untergrundes in weiten Grenzen wählen. Wegen der kürzeren Wellenlängen besitzen hochfrequentere Messungen ein höheres Auflösungsvermögen. Die stärkere Beeinträchtigung höherfrequenter Signale durch Absorption und Streuung führt jedoch zu einer entsprechenden Verringerung der Erkundungstiefe.
2 Einsatzbereiche von Georadar
Häufige Anwendungen von Georadar sind die Ortung von Rohrleitungen, Kabeln und anthropogenen Einlagerungen (z. B. Fässer, Fundamente etc.) sowie von Hohlräumen, die Straßenzustandserfassung (Asphaltdicke, Unterbau) und Bauwerksuntersuchungen (Risse, Armierung).
In der Kampfmittelräumung kommt das Verfahren derzeit immer häufiger zum Einsatz. Die Anwendung dieser Technik setzt jedoch intensive Erfahrungen mit der Auswertung der Radargramme voraus.
Vorteile des Georadarverfahrens sind die hohe Genauigkeit bei der lateralen und vertikalen Lokalisierung von Störkörpern, die Möglichkeit eines Einsatzes auch auf versiegelten Flächen sowie der große Messfortschritt und der geringe Personalbedarf. Ein weiterer wichtiger Vorteil des Georadars besteht darin, dass damit grundsätzlich die Möglichkeit besteht, auch Störkörper mit geringem bzw. fehlendem Metallanteil zu orten. Der Einsatz ist oftmals als Unterstützung an Standorten sinnvoll, an denen wegen eines hohen anthropogenen Metallanteils im Boden keine brauchbaren Messungen mit elektromagnetischen und magnetischen Verfahren erzielt werden.
Neuere Entwicklungen zielen auf die Kopplung mehrerer Radargeräte mit unterschiedlichen Frequenzen bzw. den Zusammenschluss mehrerer Geräte zu einem Array ab. Diese Systeme sind vielfach fahrzeuggestützt, womit der Messfortschritt gesteigert werden soll.
Flächenhafte Erkundungen bzw. Kartierungen des Untergrunds werden, wie in Abb. A-3.1-45 schematisch dargestellt, mit einer Sende- und Empfangsantenne von der Geländeoberfläche aus durchgeführt. Darüber hinaus werden bei der Kampfmittelräumung auch Bohrlochmessverfahren eingesetzt. Hierbei werden zwei verschiedene Methoden angewandt. Entweder werden die Messungen als Reflexionsmessung, vergleichbar dem Schema in Abb. A-3.1-45, ausgeführt, wobei sich die Sende- und Empfangsantenne gemeinsam in einem Bohrloch befinden. Bei der anderen Variante handelt es sich um Transmissions- bzw. Durchstrahlungsmessungen, bei denen sich die Sende- und Empfangsantennen in verschiedenen Bohrlöchern befinden und der dazwischen liegende Untergrund in Form einer Tomografie erfasst wird. Entscheidend für die Detektion von Kampfmitteln ist in allen Fällen ein ausreichender Kontrast der elektromagnetischen Eigenschaften des Zielobjekts (was bei Blindgängern aus Stahl eigentlich immer gegeben ist), eine ausreichende Erkundungstiefe bzw. Reichweite der Radarwellen, sowie eine ausreichende räumliche Auflösung. Die beiden letzteren hängen von der eingesetzten Messfrequenz und damit der Wellenlänge ab.
Georadar-Messungen lassen sich vor allem bei hochohmigem Untergrund wie zum Beispiel trockenen Sanden mit geringem Tonanteil erfolgreich einsetzen.
Eine starke Einschränkung kann die Detektionsleistung des Georadars auf Böden mit hoher elektrischer Leitfähigkeit erfahren, da hierdurch die Amplitude der elektromagnetischen Welle gedämpft wird, was zu einer Verringerung der Detektionstiefe führt. Böden mit höherer elektrischer Leitfähigkeit sind häufig tonreiche Böden sowie Böden aus Löss und salzhaltige Böden im Küstengebiet. Jedoch sind nicht alle tonreichen Böden problematisch für den Einsatz des Georadars, da deren elektrische Leitfähigkeit von der Art der Tonminerale bestimmt wird (maßgeblich sind hier Tonminerale mit hoher Kationenaustauschkapazität). Eine Voraussetzung für das Auftreten erhöhter elektrischer Leitfähigkeiten im Untergrund ist aber immer das Vorhandensein einer ausreichenden Bodenfeuchtigkeit. Generell tritt das Problem der Dämpfung bei trockenem Untergrund nicht auf.
Die stärkste Einschränkung für das Georadar wird jedoch von der Heterogenität des Untergrunds verursacht. Das Georadar detektiert primär Kontraste der Dielektrizitätskonstanten (Permittivität), welche im Boden vor allem vom Wassergehalt verursacht werden. Die Wassergehaltsverteilung wiederum variiert aufgrund von Unterschieden in der Porenraumverteilung, die auf Variationen der Lagerungsdichte, der Textur, der Gehalte an organischer Substanz etc. zurückgehen. Nicht zuletzt bilden Steine im Boden Kontraste, die bei der Messung mit dem Georadar als Reflexionen oder deutliche Diffraktionen detektiert werden. Letztere weisen oft die gleiche Form wie die gesuchten Objekte auf. Hieraus ergibt sich, dass vor allem in natürlichen, stark steinhaltigen Böden sowie in heterogenen Aufschüttungen immer mit einer Störung der Detektionsleistung aufgrund vielfältiger reflektierender Strukturen gerechnet werden muss.
Gute Bedingungen für die Kampfmittelsuche mit dem Georadar bieten hingegen homogen strukturierte Böden mit geringen Steingehalten und durchschnittlich hohen (bzw. niedrigen) elektrischen Leitfähigkeiten.
3 Messgeräte
Eine Radar-Apparatur besteht aus folgenden Komponenten:
- Impulsgenerator,
- Sende-Antenne zur Abstrahlung des hochfrequenten elektromagnetischen Impulses (Mittenfrequenzen je nach Einsatzbereich: 40-1.200 MHz),
- Empfangs-Antenne zum Aufnehmen der direkten und reflektierten Impulse,
- Empfangssystem, das die Impulse umsetzt, speichert und darstellt.
Die Zeitfenster für Georadar-Messungen reichen von einigen 10 ns (Meterbereich) bis 1.000 ns (Zehner-Meterbereich). Die Messungen erfolgen je nach Messfrequenz mit Samplingintervallen teilweise im Subnanosekundenbereich mit hoher Dynamik analog oder digital.
Die Komponenten können je nach Hersteller sehr unterschiedlich aufgebaut und angeordnet sein, ihre prinzipielle Wirkungsweise ist aber in der Regel gleich.
4 Durchführung von Feldmessungen
Erfolgsaussichten abschätzen: Vor der Durchführung einer Georadarmessung sind die Erfolgsaussichten abzuschätzen. Dazu gehört, dass folgende Informationen (z. B. durch eine Ortsbesichtigung oder Einsicht in geologische/hydrologische Karten) beschafft und in einem Lageplan protokolliert werden müssen:
- Lage des Grundwasserspiegels,
- Art des Materials der Deckschichten (Sedimenttyp wie z. B. Ton oder Sand),
- Lage von Gebäuden und
- Lage ober- und unterirdischer Leitungen.
Im Weiteren sind die Mittenfrequenz der Radarimpulse und die maximale Eindring-(Erkundungs-)tiefe zu ermitteln.
Zur Abschätzung der Absorption bzw. Dämpfung der Radarwellen und damit der maximalen Reichweite können beispielsweise die Ergebnisse von geoelektrischen Messungen herangezogen werden, um die Größenordnung der elektrischen Leitfähigkeit der Sedimente am Untersuchungsort zu ermitteln. Problematisch ist die Anwendung des Georadars auf Böden mit hoher elektrischer Leitfähigkeit. Dies können feuchte tonige oder salzhaltige Böden sein. Auch künstliche Aufschüttungen wie Schichten aus metallhaltigen Schlacken unter Wegen und Plätzen können abschirmend wirken.
Durchführung einer Testmessung: Auf einem für das Messgebiet typischen Profilabschnitt mit möglichst bekannten Verhältnissen im Untergrund sollte eine Testmessung durchgeführt werden. Die Testmessung soll zeigen, ob sich das Erkundungsobjekt (z. B. Blindgänger) mit den gewählten Parametern für das Georadar erfassen lässt.
Messpunktabstand: Abhängig von der Aufgabenstellung und dem gewünschten Messfortschritt. Bei Antennen, die kontinuierlich über die Erkundungsfläche gezogen werden können, ist der Messpunktabstand abhängig von der Lauf- bzw. Fahrgeschwindigkeit.
Profilabstand: Abhängig von der Größe der zu untersuchenden Strukturen. Für flächige Übersichtsmessungen gilt: Ca. eine Wellenlänge der verwendeten Mittenfrequenz fm wählen.
Abstand der Sende- und Empfangsantenne: Bei Systemen mit einer getrennten Sende- und Empfangsantenne sollte der Abstand der beiden Antennen ein Viertel bis ein Fünftel der erwarteten Reflektor- und Diffraktortiefe betragen.
5 Messergebnisse
Radargramme zeigen häufig durch die Vielzahl von Diffraktionshyperbeln ein kompliziertes Bild, dessen Interpretation große Erfahrung voraussetzt (Abb. A-3.1-46). Meist wird aus der Lage des Scheitelpunktes der Hyperbel direkt auf die Lage des Diffraktionszentrums geschlossen (z. B. bei der Leitungs-, aber auch Blindgängerortung).
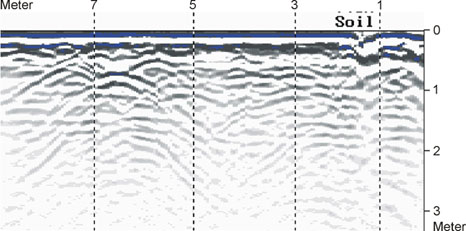
Abb. A-3.1-46: Typisches Radargramm mit einer Vielzahl von Diffraktionshyperbeln, die auf lokale Störkörper im Untergrund schließen lassen. Die Daten wurden mit einer 250 MHz-Antenne aufgenommen (geoFact GmbH).
Die Daten profilhafter Messungen werden aufgrund der hohen Messpunktdichte oft als Graustufen- oder Rasterplots komprimiert dargestellt (Abb. A-3.1-46). Zur Ergebniszuordnung sind ein Laufzeit- und ein Wegmaßstab sowie die Angabe des zeitlichen Nullpunktes, des Antennenoffsets, der Geschwindigkeits-Tiefenfunktion und/oder ein daraus abgeleiteter Tiefenmaßstab erforderlich. Die Ansprache von Horizonten und Objekten ist gut zu begründen.
Um die Interpretation von Radargrammen zu erleichtern, steht eine Vielzahl von Datenbearbeitungsschritten (Filterung, Dekonvolution, Migration etc.) zur Verfügung. Die Interpretation von Radarmessungen kann durch Modellrechnungen begleitet und überprüft werden.
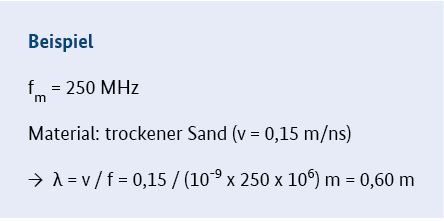
6 Beispiel
Beim Georadar werden elektromagnetische Wellen von einer Sendeantenne in den Untergrund abgestrahlt. Treffen diese auf eine Schichtgrenze oder Objekte im Untergrund, werden sie zurückgeworfen und können mit einer Empfangsantenne registriert werden.
Die Amplitude und Form der Reflexion im Radargramm hängt von der Größe, Form, Ausrichtung und elektrischen/dielektrischen Eigenschaften des Objekts ab. Metallische Objekte haben aufgrund ihrer extrem hohen elektrischen Leitfähigkeit einen Reflexionskoeffizienten von 1 (d. h. die gesamte Energie der Elektromagnetischen Welle wird zurückgeworfen), und sie sind deutlich vom Untergrund unterscheidbar. Sind die Objekte in etwa gleich groß oder etwas kleiner als die Wellenlänge der verwendeten Radarwellen (ca. 1 m bei 100 MHz bis ca. 10 cm bei 1 GHz), so kann ihre geometrische Form nicht aufgelöst werden. Man spricht dann von Diffraktion und man kann diese Objekte im Radargramm anhand von Diffraktionshyperbeln erkennen. Die Ausdehnung der Objekte kann erst abgebildet werden, wenn sie deutlich größer als die Wellenlänge sind.
In der folgenden Abbildung A-3.1-47 wird das Ergebnis der Detektion von drei verschiedenen Objekten mit zwei unterschiedlichen Georadarantennen dargestellt. Die Messung wurde vom Leibniz-Institut für Angewandte Geophysik Hannover (LIAG) auf einem mit verschiedenen Objekten bestückten Testboden aus schwach feuchtem Löss durchgeführt, um die Leistungsfähigkeit von GPR-Verfahren in der Kampfmitteldetektion zu untersuchen. Im hier gezeigten Beispiel wurden geschirmte Radarantennen mit einer Mittenfrequenz von 200 MHz (oben) und 400 MHz (unten) eingesetzt. Bei den Testkörpern handelt es sich von links nach rechts um einen 20 l-Plastikkanister, zwei horizontal nebeneinander liegende 120 mm-Mörsergranaten und eine Panzerabwehrmine. Die Oberkanten der Objekte befinden sich in Tiefen von 30, 60 und 50 cm (von links nach rechts). Wie aus der Abbildung ersichtlich ist, bilden sich alle drei Ziele durch deutliche Diffraktionshyperbeln im Radargramm ab. Eine Ortung der Objekte in diesem relativ homogenen Substrat ist mit dieser Technik gut möglich.
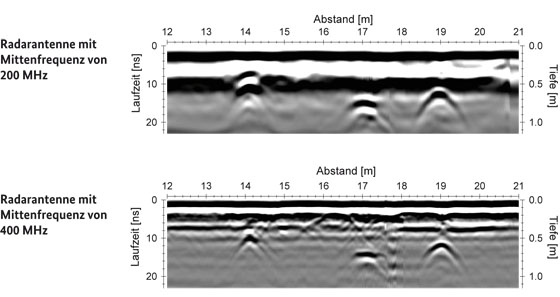
Abb. A-3.1-47: Detektion eines Plastikkanisters, zweier liegender Mörsergranaten und einer Panzerabwehrmine in einem Testboden mit zwei unterschiedlichen GPR-Antennen (LIAG Hannover)
Allgemein bleibt festzuhalten: Beim Einsatz von Georadar sind gute Ergebnisse bei einem Untergrund aus Kiesen, Sanden oder Torfen sowie im Süßwasser zu erwarten. Die Einsatzfähigkeit wird hingegen begrenzt durch einen Untergrund mit einer hohen elektrischen Leitfähigkeit (z. B. Tone und Lössböden mit hoher Kationenaustauschkapazität sowie im Salzwasser) oder durch einen stark heterogenen Untergrund.