

A-3.1.2 Magnetik
1 Grundlagen
|
Aufgabe: |
Erfassung und Kartierung des Erdmagnetfeldes bzw. dessen Verzerrungen (Anomalien) entlang von Profilen oder auf Flächen. |
Das Erdmagnetfeld (s. a. Knödel et. al. 1997)
Überall auf der Erde gibt es ein natürliches Magnetfeld, das eine horizontal freibewegliche Magnetnadel (magnetischer Kompass) in die (magnetische) Nordrichtung einstellt. Ursache dafür ist, dass die Erde wie ein magnetischer Dipol wirkt und um sich ein eigenes Magnetfeld ausbildet. Der Dipol ist dabei nach Süden gerichtet, so dass unter einem Punkt in der Nähe des geographischen Nordpols ein magnetischer Südpol liegt. Der Grund für diese Sprachverwirrung liegt in der seit Alters her gebräuchlichen Bezeichnung „Nordpol“ für das Nordende der Kompassnadel. Man hätte es besser den nordsuchenden Pol nennen sollen.
Die Entstehung dieses Feldes beruht auf der unterschiedlichen Rotationsgeschwindigkeit zwischen Erdkern und Erdmantel. Das Feld ist so ausgeprägt, dass auf der Nordhalbkugel der magnetische Südpol und auf der Südhalbkugel der magnetische Nordpol liegt (Abb. A-3.1-1).
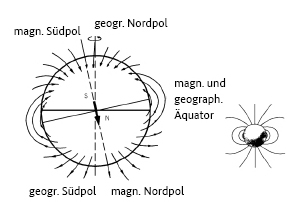
Abb. A-3.1-1: Das Magnetfeld der Erde (vereinfacht)
Außerdem fallen die magnetischen Pole nicht mit den geografischen zusammen, sondern bilden zwischen ihren Achsen einen Winkel von ca. 11,4°. Die Lage der magnetischen Pole verändert sich zudem ständig. Zwischen den Polen hat sich ein räumliches magnetisches Feld ausgebildet, dessen Wirkung durch Feldlinien gekennzeichnet ist. Entsprechend allgemeingültigen Festlegungen treten die magnetischen Feldlinien aus dem magnetischen Nordpol aus und in den magnetischen Südpol ein. Dabei verändern sich die Aus- und Eintrittswinkel zwischen 90° an den Polen und annähernd 0° am magnetischen Äquator. Die Flussdichte der Feldlinien ist an den Polen am größten und beträgt ca. 62.000 nT (Nanotesla) und nimmt zum Äquator auf ca. 31.000 nT ab. In Deutschland treten die Feldlinien unter einem Winkel zwischen 60 - 65° in Richtung zum geografischen Nordpol in die Erdoberfläche ein und haben eine Flussdichte von ca. 50.000 nT.
Diesem aus dem Erdinneren stammenden, mit der Zeit nur sehr langsam (in Jahren bis Jahrzehnten) veränderlichen Hauptfeld überlagert sich ein schnell (in Bruchteilen von Sekunden bis Tagen) veränderlicher Feldanteil, der seinen Ursprung außerhalb des Erdkörpers hat (Außenfeld, Variationsfeld). Zu diesen globalen Anteilen des erdmagnetischen Feldes kommt ein zeitlich nahezu konstantes Anomalienfeld, das die unterschiedliche Magnetisierung des Materials in der oberen Erdkruste widerspiegelt.
Das Magnetfeld ist ein Vektorfeld, d. h. es wird durch seine Totalintensität (Betrag) und seine Richtung beschrieben. Die Anteile des Gesamtmagnetfeldes (Hauptfeld, Variationsfeld und Anomalienfeld) addieren sich vektoriell (Abb. A-3.1-2).
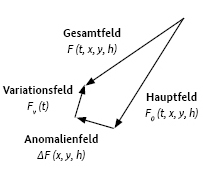
Abb. A-3.1-2: Zusammensetzung des magnetischen Gesamtfeldes (Knödel et al., 1997)
Als Ursachen kommen für das Anomalienfeld nicht nur geologische Strukturen (z. B. Basaltkörper, Erzlagerstätten, Raseneisenerze), sondern auch Einlagerungen im Erdreich (z. B. Autowracks, alte Haushaltsgeräte, Bauschutt mit Armierungseisen, Bomben, Spundwände, Verpackungsmaterial wie Fässer, Lack- und Farbbehälter, Konservendosen) in Betracht.
Ziel der angewandten Magnetik ist es, das Anomalienfeld zu erfassen und daraus Aussagen über dessen Ursachen abzuleiten. Dazu müssen das Haupt- und das Variationsfeld eliminiert werden. Dargestellt wird das Anomalienfeld als Isolinienkarte oder als Profilmontage. Eine flächenhafte Farbdarstellung oder Rasterung macht Isolinienkarten anschaulicher. Abb. A-3.1-3 zeigt die Anomalienform eines kugeligen Störkörpers, gemessen auf einem Profil direkt über dem Störkörper in Nord-Süd-Richtung.
Die Intensität des Erdmagnetfeldes wird in Nanotesla (nT) gemessen (1 nT = 10-9 Tesla). Als Beträge der magnetischen Flussdichte sind in Europa für das Hauptfeld 40.000 bis 52.000 nT, für das Variationsfeld 0,1 bis einige 100 nT und für das Anomalienfeld bis zu einigen 1.000 nT zu erwarten. In der Kampfmittelsuche können die Werte je nach Größe des Objektes und seiner Tiefenlage aber auch nur einige nT und weniger betragen.
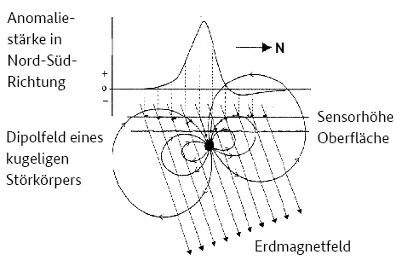
Abb. A-3.1-3: Dipolfeld eines kugeligen Störkörpers mit zugehörigem Anomalienbild (Neubauer, 1990).
Induzierte und remanente Magnetisierung
Das magnetische Anomalienfeld hat seine Ursachen in lokalen und regionalen Unterschieden der Magnetisierung der Gesteine und anderer magnetisch wirksamer Materialien. Man unterscheidet eine induzierte und eine remanente Magnetisierung, die sich vektoriell addieren.
Induzierte Magnetisierung
Die induzierte Magnetisierung ist proportional zu dem am Ort herrschenden Magnetfeld. Die magnetische Suszeptibilität κ und die relative magnetische Permeabilität μ sind Maßzahlen, welche die stofflichen Eigenschaften magnetischer Stoffe widerspiegeln. In der angewandten Magnetik rufen technisch hergestellte Ferromagnetika wie z. B. reines Eisen mit μ≈ 1.000 und reines Nickel mit μ≈ 300 die größten Anomalien hervor.
Die homogen magnetisierte Kugel dient als einfachstes Modell eines künstlichen Störkörpers (Bombe). Die Berechnung des dazugehörigen Anomaliefeldes zeigt, dass das Feld (Totalfeld) mit der dritten Potenz der Entfernung d abnimmt.
Abb. A-3.1-3 zeigt das für Mitteleuropa (I = 60 – 70°) typische Bild einer Totalfeldanomalie, hervorgerufen durch die induzierte Magnetisierung (stärkeres Südmaximum und schwächeres Nordmaximum). Der Störkörper ist im Übergangsbereich zwischen den Extrema zu suchen.
Das Anomalienfeld ist also nicht nur von der Größe und Magnetisierung des Störkörpers abhängig, sondern in ganz starkem Maße auch von seiner Tiefenlage. Bei einer Totalfeldmessung nimmt die Amplitude mit 1/d3, bei einer Gradientenmessung mit 1/d4 ab. Dies bedeutet, dass im Vergleich zu einem Störkörper in 1 m Tiefe ein gleicher Störkörper in 2 m Tiefe nur noch 1/8 (Totalfeld) bzw. 1/16 (Gradientenfeld), in 3 m Tiefe nur noch 1/27 bzw. 1/81 der gemessenen Amplitude des Magnetfeldes von 1 m Tiefe besitzt.
Remanente Magnetisierung
Der Teil der Magnetisierung eines Gesteins oder Materials, der im feldfreien Raum nicht verschwindet, wird remanente Magnetisierung genannt. Sie ist abhängig vom Gehalt an ferromagnetischen Stoffen und von der Entstehungsgeschichte.
Ein Beispiel für remanente Magnetisierung sind aufmagnetisierte Körper, d. h. Körper, die schon sehr lange im Boden liegen. Diese bilden im Laufe der Zeit einen eigenen Nord- und Südpol aus. Weiterhin kann es auch schon beim Produktionsprozess ferromagnetischer Stoffe aufgrund von Erhitzungs- und Abkühlungsprozessen zu einer remanenten Magnetisierung kommen.
Erfahrungen zeigen, dass bei Fundmunition die remanente Magnetisierung größer sein kann als die induzierte Magnetisierung. Es kommt auch vor, dass Munition (Bomben) beim Aufprall auf den Boden ihre vorher vorhandene remanente Magnetisierung verliert, d. h. die magnetischen Dipole sind innerhalb des Körpers dann wieder zufällig orientiert (Altshuler, 1996).
Induzierte und remanente Magnetisierung addieren sich vektoriell. Daher kann sich je nach Lage des Körpers im Raum die Gesamtmagnetisierung verstärken oder auch abschwächen. Im für die Erkundung ungünstigsten Fall verschwindet sie nahezu ganz.
2 Messgeräte
Magnetometer sind hochempfindliche Messsysteme, die in der Lage sind, Störungen des Erdmagnetfeldes infolge ferromagnetischer Gegenstände anzuzeigen. Aus der Gruppe der Magnetometer sind in der Praxis am häufigsten die Saturationskern-Magnetometer, auch Fluxgatemagnetometer, Förstersonden oder Eisendetektoren genannt, vertreten. Weniger häufig trifft man in der Kampfmittelräumung auf Protonenresonanz-Magnetometer (Kernpräzessionsmagnetometer) bzw. Absorptionszellen-Magnetometer (optisch gepumpte Cs-Dampfmagnetometer), obwohl letztere eine besonders hohe Empfindlichkeit aufweisen.
Fluxgatemagnetometer messen die Komponenten des Magnetfeldes (z. B. die Vertikalintensität) oder die Gradienten (z. B. den Gradienten der Vertikalintensität). Protonenresonanz-Magnetometer und Absorptionszellen-Magnetometer bestimmen die Totalintensität. 3-Achs-Magnetometer messen sowohl die einzelnen Komponenten des Magnetfeldes (Vertikal- und Horizontalintensität) als auch die Totalintensität bzw. in Mehrfachanordnung deren Gradienten sowie die Winkeldifferenz der Horizontalkomponenten.
Einsatzbereiche von Magnetometern
Magnetometer dienen zur Lokalisierung von ferromagnetischen Störkörpern im Erdboden oder im Wasser in Abhängigkeit von deren Größe bis maximal 6 m Tiefe. In Verbindung mit computergestützten Datenaufnahme- und Auswertesystemen und herkömmlicher oder GPS-gestützter (Global Positioning System) Vermessung ist man in der Lage, Kartierungen von belasteten Flächen vorzunehmen und diese auch auszuwerten.
Bei der Suche nach Bombenblindgängern in größeren Tiefen oder in oberflächlich gestörten Bereichen werden Magnetometer in Verbindung mit Aufnahme- und Auswertesystemen auch zur Bohrlochsondierung verwendet.
Magnetometer sind leichte, tragbare Messsysteme, die ein berührungs- und zerstörungsfreies Messen ermöglichen, sie sind einfach handhabbar, schnell arbeitsbereit, meist durch eine Person bedienbar, erlauben einen großen Messfortschritt, haben einen geringen Energiebedarf und arbeiten mit ausreichend hoher Genauigkeit (Abb. A-3.1-4).
|
Abb. A-3.1-4: Eisendetektor EL 1303 der Firma Vallon im Einsatz (Foto: Vallon) |
Im Folgenden werden die Eigenschaften des Fluxgate-Magnetometers (s. Knödel et al., 1997), des Absorptionszellen-Magnetometers und der Aufbau von Gradiometern beschrieben.
Fluxgatemagnetometer nutzen die Nichtlinearität der Magnetisierungskurve B als Funktion von H hochpermeabler Spulenkerne, die durch ein periodisches Wechselfeld bis zur Sättigung magnetisiert werden, zur Messung der Magnetfeldkomponente (Gleichfeld) parallel zur Kernachse (B = magnetische Flussdichte; H = magnetische Feldstärke). Mit Fluxgatemagnetometern ist eine kontinuierliche Messung möglich. So können 40 Messwerte pro Sekunde beim Abschreiten eines Messprofiles gewonnen werden. Damit ist die für die Kampfmittelsuche notwendige hohe Messpunktdichte mit einem vertretbaren Zeitaufwand zu erreichen. Fluxgatemagnetometer werden zur Messung von 1 oder 3 Komponenten des erdmagnetischen Feldes oder als Gradiometer z. B. zur Messung des Vertikalgradienten der Vertikalkomponente eingesetzt.
|
Kenndaten für Fluxgatemagnetometer: |
|
|
Empfindlichkeit |
0,1 nT |
|
Messgenauigkeit |
±1 nT |
|
Dynamikbereich |
±2.000 bzw. 30.000 nT |
|
Zeit für einen Messzyklus |
20 ms |
|
Messwerte pro Meter |
1 – 8 |
|
Temperaturbereich |
-10° bis +40 °C |
|
Temperaturgang |
0,1 nT/°C |
Absorptionszellenmagnetometer (Quantenmagnetometer, Magnetometer mit optisch gepumpten Gasen) bestimmen die Totalintensität des Erdmagnetfeldes. Die Messung der Magnetfeldstärke beruht auf dem Zeeman-Effekt, d. h. der Aufspaltung der Spektrallinien im Magnetfeld. Der Frequenzabstand der aufgespalteten Spektrallinien ist zur magnetischen Feldstärke proportional. Die Empfindlichkeit dieses Magnetometertyps ist um etwa zwei Zehnerpotenzen höher als bei Protonenmagnetometern (Schwellenwerte 0,0025 ... 0,1 nT). Der hohen Empfindlichkeit steht derzeit ein hoher Anschaffungspreis gegenüber.
Absorptionszellenmagnetometer sind beschleunigungsunempfindlich und damit zur Messung auf bewegten Systemen (z. B. Flugzeuge, Schiffe) geeignet.
Gradiometer (Eisendetektoren mit zwei Sensoren im Differenzmessverfahren) sind in der Praxis weit verbreitet. Die beiden Sensoren müssen mechanisch sehr genau und stabil im Sondenrohr befestigt und aufeinander abgestimmt sein. Durch die Differenzschaltung eliminiert man den als konstant zu betrachtenden Teil der Feldstärke des Erdmagnetfeldes, des Außenfeldes und geologischer Strukturen. Dies gilt ebenso für Störungen z. B. von elektrisch betriebenen Eisen-/Straßenbahnen, die oft die Aufnahme der Totalfeldanomalien unmöglich machen, während echte, d. h. zeitgleiche Gradientmessungen in solchen Fällen noch auswertbare Ergebnisse erbringen.
Je nach eingestellter Empfindlichkeit des Messgerätes wird die Feldstärke der Anomalie angezeigt. Gewöhnlich macht gleichzeitig ein akustisches Signal auf die sich verändernde Feldstärke aufmerksam. Der Geräteführer ist somit in der Lage, während des Messvorgangs den Störpunkt zu lokalisieren. Die Messdaten und zugehörigen Koordinaten des Geländes lassen sich auch bei diesem Messverfahren durch Zusatzgeräte speichern und über Computer auswerten.
Vorteile der Gradiometermessungen sind:
- Elimination des erdmagnetischen Variationsfeldes und regionaler Trends,
- größere Empfindlichkeit der Gradienten für oberflächennahe Störkörper,
- bessere räumliche Auflösung von eng beieinanderliegenden Einzelanomalien.
Aufbau der Messgeräte:
Die in der Kampfmittelräumung hauptsächlich eingesetzten Geräte sind im Differenzmessverfahren arbeitende Gradiometer unterschiedlicher Ausführung bezüglich ihres inneren Aufbaus. Äußerlich unterscheiden sich die Geräte nur wenig. Sie bestehen aus den Hauptteilen (s. Abb. A-3.1-4):
- Sondenrohr mit zwei Sensoren,
- Elektronikteil mit Anzeigegerät und Bedienungselementen,
- Tragerohr mit Batteriebehälter,
- Zusatzteile wie Kopfhörer, Tragegurt u. a.
Die Gesamtmasse der Geräte liegt zwischen 3,9 kg und 5,3 kg und muss die Tragbarkeit der Geräte durch den Nutzer über einen Tag ermöglichen. Sie wird maßgeblich durch das verwendete Material (Messing, Aluminium oder Kunststoff) bestimmt. Der Sensorabstand in den Sondenrohren liegt zwischen 400 mm und 650 mm. Die Empfindlichkeit der Geräte wird in Stufen geregelt und umfasst einen Bereich von 0,3 nT bis 10.000 nT, wobei sich die Abstufungen bei den Herstellern unterscheiden (s. Tab. A-3.1-3). Die Geräte ermöglichen eine kontinuierliche Messwerterfassung. Zahlreiche Geräte besitzen verschieden einstellbare Betriebsarten wie logarithmische Messwertaufnahme, zusätzliche Dämpfungen, Möglichkeiten zur Suche von stromführenden Kabeln, Unterdrückung von Wechselspannungen verschiedener Frequenzen, Unterdrückung von konstanten Störquellen, Nutzung der Sonde als Kompass u. a.
Im Verlaufe der Weiterentwicklung wurden alle neueren Gerätetypen mit Anschlussmöglichkeiten für Datenaufnahmegeräte und teilweise auch mit digitaler Messwerterfassung sowie zur Nutzung von GPS-Systemen vorgesehen.
|
Hersteller/Typenbezeichnung |
Empfindlichkeitsbereiche |
Bemerkungen |
|
|
Foerster GmbH & Co.KG FEREX-Detektoren |
|||
|
Stufe 1 - linear Stufe 2 - linear Stufe 3 - linear Stufe 4 - linear Stufe 5 - linear Stufe 6 - linear Stufe 7 - linear Stufe 8 - linear Stufe 9 - logarithmisch |
0 - 3 nT/m 0 - 10 nT/m 0 - 30 nT/m 0 - 100 nT/m 0 - 300 nT/m 0 - 1.000 nT/m 0 - 3.000 nT/m 0 - 10.000 nT/m 0 - 10.000 nT/m |
Diese „Stufen“ sind am Gerät nicht als „Stufe Nr. X“, sondern als Skalenwert in nT bzw. in nT/10 angegeben. |
|
|
Ebinger Prüf- und Ortungstechnik GmbH MAGNEX 120 |
|||
|
Stufe 1 - linear Stufe 2 - linear Stufe 3 - linear Stufe 4 - linear Stufe 5 - linear Stufe 6 - linear |
0 - 3.000 nT/m 0 - 1.000 nT/m 0 - 300 nT/m 0 - 100 nT/m 0 - 30 nT/m 0 - 10 nT/m |
||
|
Vallon GmbH EL1302D1 |
|||
|
Stufe 1 - linear Stufe 2 - linear Stufe 3 - linear Stufe 4 - linear Stufe 5 - linear Stufe 6 - linear Stufe 7 - linear |
lin x 1 0 - 2.000 nT/m 0 - 600 nT/m 0 - 200 nT/m 0 - 60 nT/m 0 - 20 nT/m 0 - 6 nT/m 0 - 2 nT/m |
lin x 10 0 - 20.000 nT/m 0 - 6.000 nT/m 0 - 2.000 nT/m 0 - 600 nT/m 0 - 200 nT/m 0 - 60 nT/m 0 - 20 nT/m |
Bei der computergestützten Detektion wird immer der höchst empfindliche Messbereich (unabhängig von der Stellung des Empfindlichkeitsschalters) zur Datenaufnahme verwendet. Die Größe der Darstellung einer Messkurve am Bildschirm ist eine rein optische Maßnahme, die die Original-Messdaten nicht verändert. |
3 Durchführung von Feldmessungen
3.1 Voraussetzungen
Um die geforderte Qualität der Arbeit bei der Störkörpersuche zu erreichen, sind folgende grundsätzlichen Voraussetzungen zu erfüllen:
Der Geräteführer muss sich intensiv mit seinem Gerät und dessen Bedienungsanleitung vertraut machen. Dazu gehört vor allem das Herstellen der Arbeitsbereitschaft, die Inbetriebnahme, die Überprüfung der Funktionsbereitschaft, die Einstellung der optimalen Messbereiche und der Umgang mit dem Gerät vor, während und nach der Arbeit.
Bevor ein Geräteführer mit seiner Arbeit beginnt, muss man ihm die Möglichkeit einräumen, sich auf einer geeigneten Testfläche unter Anleitung erfahrener Ausbilder praktische Fertigkeiten im Umgang mit dem Gerät anzueignen. Dazu gehört, dass er in der Lage ist, das Gerät richtig zu kompensieren, es in der Suchspur oder bei der computergestützten Aufnahme einer Fläche richtig zu handhaben und Größen-, Lage- und Tiefenbestimmungen durchzuführen.
Unabhängig von der Art der verwendeten Geräte muss der Geräteführer metallfrei und frei von Erzeugern elektromagnetischer Signale und magnetischer Gegenstände sein. Das betrifft vor allem sein Schuhwerk und seine Bekleidung. Aber auch Uhren, Schlüsselbunde, Messer oder Geldbörsen sowie Handys müssen vor Beginn der Arbeit abgelegt werden. Außerdem ist zu beachten, dass beim Einsatz mehrerer Geräte eine gegenseitige Beeinflussung durch zu geringen Abstand entsteht. Beim Einsatz von Baugeräten sollte z. B. der Abstand zwischen Messort und Baugerät mindestens 4 m betragen. Zur Markierung georteter Störpunkte sind geeignete nichtmetallische Gegenstände zu verwenden.
3.2 Feldmessung ohne computergestützte Datenaufnahme (Flächensondierung)
Vor Beginn der eigentlichen Sondierung, wie die Tätigkeit in der Kampfmittelräumung bezeichnet wird, ist die gesamte zu räumende Fläche durch geeignete Mittel zu markieren. Außerdem wird vorausgesetzt, dass die Fläche von Bewuchs freigeschnitten ist. Danach werden i. d. R. Flächen mit den Abmessungen 25 x 25 m für die einzelnen Räumpaare abgeteilt. Ein Räumpaar besteht aus einem Geräteführer und einem Räumarbeiter. Das Räumpaar unterteilt sich seine Fläche in Streifen (Spuren) von 0,5 m bis 2 m Breite und markiert die erste mit Trassierband, einer Schnur oder Richtungspflöcken. Durch die fachtechnische Aufsichtsperson ist ein geeigneter Punkt zum Kompensieren der Sonde festzulegen. Das Kompensieren hat in der höchsten Empfindlichkeitsstufe zu erfolgen, in der gearbeitet wird. Die Empfindlichkeitsstufe und die Sondenart werden oft durch den Auftraggeber vorgegeben oder durch Forderungen wie „frei von ferromagnetischen Gegenständen“ bestimmt.
Man beginnt die Arbeit mit einer Empfindlichkeitsstufe, die den Geländebedingungen entspricht und erhöht ständig bis zur geforderten Stufe. Das Sondenrohr ist in einem Abstand von 5 cm bis max. 10 cm senkrecht über der Erdoberfläche zu führen. Dabei darf es nicht pendeln und nicht seitlich geschwenkt werden, sondern muss mäanderförmig die Suchspur abtasten (Abb. A-3.1-5).
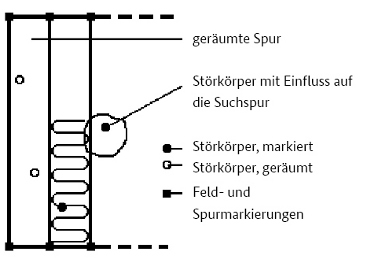 |
Abb. A-3.1-5 Der Suchvorgang
Bei Störsignalgrößen an der Grenze des Messbereiches ist in die nächstniedrigere Empfindlichkeitsstufe zurückzuschalten. Störpunkte sind mit geeigneten Mitteln zu markieren und die dort befindlichen Störkörper durch den Räumarbeiter vorsichtig freizulegen. Beim Verdacht eines Munitionskörpers hat die fachtechnische Aufsichtsperson die Identifizierung durchzuführen und über den Umgang mit dem Munitionskörper zu entscheiden. Nach dessen Bergung ist vor dem Verfüllen der Grube grundsätzlich eine Nachkontrolle durchzuführen.
Aus der Nachbarspur hereinreichende Störungen sind ebenfalls zu markieren, freizulegen und zu bergen, um ein Verdecken von kleinen Störkörpern zu verhindern.
3.3 Feldmessung mit computergestützter Datenaufnahme und Datenauswertung
Die aufzunehmende Fläche ist zu kennzeichnen, dabei gibt es praktisch keine Begrenzung in ihren Abmessungen. Die Fläche sollte aber rechteckig sein oder sich aus solchen Teilen zusammensetzen.
Vor Beginn der Feldmessung sind die Sonde, das Datenaufnahmegerät (Datalogger) und - wenn vorhanden - das GPS-System anzuschließen und in Betrieb zu nehmen. Dazu sind in den Datalogger die Koordinaten des aufzunehmenden Feldes und bestimmte andere Angaben, wie Spurbreite, Spurlänge, Messpunktabstand u. a. einzugeben. Die Sonde ist zu kompensieren und auf einen niedrigen Empfindlichkeitsbereich einzustellen. Danach sind die Spuren nacheinander zügig und ohne Abweichungen abzulaufen, dabei ist das Datenaufnahmegerät zu beobachten, zu bedienen und nach seinen Anweisungen zu handeln. Das Messgerät auf der Sonde bleibt während des Messvorgangs unbeachtet.
Bei Verwendung von GPS ist darauf zu achten, dass die entsprechende Anzahl von Satelliten (Satellitenfahrplan beachten) während der Messung zur Verfügung steht. Prinzipiell erzeugen Abweichungen von der Spur, unterschiedliche Aufnahmegeschwindigkeiten und eine ungenügende Anzahl von Satelliten unbrauchbare Messergebnisse. Verschiedene Firmen bieten für die Datenaufnahme Hilfsmittel an, wie z. B. SAPOS®, ein System zur Positionierung der Aufnahmesensoren während der Messung oder Mehrkanal-Datenaufnahmeeinrichtungen für tragbare Einrichtungen mit zwei oder drei Sondenrohren sowie fahrbare Geräte mit bis zu acht Sondenrohren. Damit kann die aufzunehmende Fläche in kürzerer Zeit bearbeitet werden.
Die Abbildungen A-3.1-6 bis -9 zeigen Ausführungen von Einkanal-/Mehrkanalsystemen verschiedener Hersteller.
|
Abb. A-3.1-6: FEREX 4.032 DLG mit GPS (Foto: Neumann)
|
Abb. A-3.1-7: Tragbares 3-Kanal-Aufnahmegerät von Sensys, auch mit GPS verwendbar (Foto: Neumann)
|


Nach Abschluss der Datenaufnahme müssen die Daten in einen Rechner überspielt und ausgewertet werden. Dazu bieten mehrere Firmen Softwareprogramme an, mit denen teilweise automatisch ausgewertet werden kann. Die ermittelten Störpunkte sind anschließend im Gelände einzumessen, um sie zu überprüfen. Dabei spielt die Genauigkeit der Datenaufnahme einschließlich ihrer Koordinaten eine bedeutende Rolle. Abweichungen von bis zu einem Meter im Umkreis bei behelfsmäßiger Vermessung erfordern ein erneutes Sondieren vor Ort. Uneffektiv ist es auch, eine hoch belastete Fläche mit bspw. mehr als 5 Störpunkten pro m2 auf diese Weise zu räumen. Vielmehr stellen diese Feldaufnahmen eine Grundlage für die Abschätzung des Räumaufwandes für eine Firma bzw. ein Dokument über die Störkörper- bzw. Kampfmittelfreiheit einer Fläche dar.
|
Abb. A-3.1-8: Fahrbares 8-Kanal-Aufnahmegerät von Sensys mit GPS (Foto: Neumann)
|
Abb. A-3.1-9: Fahrbares 8-Kanal- Aufnahmegerät von FOERSTER (Multikat) mit GPS (Foto: Neumann)
|


3.4 Bohrlochsondierung
Bohrlochsondierungen werden eingesetzt, wenn mit der oberflächennahen Geophysik die erforderliche Detektionstiefe (= Kampfmittelhorizont) nicht erreicht werden kann (z. B. tiefliegende Bomben, hohe ferromagnetische Belastung an der Oberfläche).
Grundsätzlich wird hierbei unterschieden zwischen der Bohrlochsondierung und der Drucksondierung.
Bei der Bohrlochsondierung wird unter Sicherheit und mit schonenden Verfahren (drehend/spülend) ein Bohrloch errichtet und meist mit Kunststoffrohren ausgebaut. In dieses Bohrloch wird bspw. eine geomagnetische Sonde mit EDV-Aufzeichnung eingeführt (Differenzfeldstärke- oder Totalfeldmessung). Aber auch Elektromagnetik und Bohrlochradar, letzteres vorwiegend zur Überprüfung und genaueren Charakterisierung von magnetischen Anomalien, werden zunehmend in der Kampfmittelräumung eingesetzt.
Die Drucksondierung hat ihren Ursprung in der Baugrunderkundung. Hierbei wird eine Sonde mit kegelförmiger Spitze mithilfe eines Gestänges in den Boden gedrückt unter kontinuierlicher Aufzeichnung von Bodenparametern (CPT – Cone Penetration Test). Bei der Kampfmittelräumung wird dieser Sonde ein Magnetometer nachgesetzt. Die Aufzeichnung erfolgt kontinuierlich während des Drückens. Da die Datenaufzeichnung dabei in Echtzeit visualisiert werden kann, ermöglicht dieses Verfahren den unmittelbaren Eingriff in die Messung während der Ausführung (z. B. bei Annäherung an einen ferromagnetischen Störkörper). Zudem können die ermittelten geotechnischen Werte als Grundlage für die Bestimmung der örtlich spezifischen Eindringtiefe von Abwurfmunition verwendet werden und ggf. direkt bei der laufenden Sondierung Berücksichtigung finden.
Ausgangspunkt für beide Verfahren ist die Suche nach Bombenblindgängern bzw. der Verdacht auf Bombenblindgänger als Ergebnis der Luftbildauswertung. Bombenblindgänger liegen in der Regel nicht an ihrem Einschlagspunkt. Sie haben sich in einer charakteristischen Bahn unter der Erde fortbewegt und liegen meist in einem gewissen Abstand und in größerer Tiefe vom Einschlagspunkt.
Die Koordinaten des Einschlagspunktes werden aus Luftbildern ermittelt und im Gelände eingemessen. Dieser Verdachtspunkt ist auch gleichzeitig der Ort der ersten Sondierung. Um diesen Punkt wird ein Raster gelegt. Die Rasterweite ist abhängig von der Größe des zu suchenden Kampfmittels und vom Signal-Rausch-Verhältnis des Untergrundes.
Neben der Überprüfung von luftbildsichtigen Bombenblindgängerverdachtspunkten werden Bohrlochsondierungen in bombardierten Gebieten bspw. auch zur Freigabe von Verbauachsen oder Pfahlgründungen eingesetzt.
Bei der Bohrlochsondierung ist das Niederbringen der ersten Bohrung unter sicherheitstechnischen Gesichtspunkten als am gefährlichsten einzustufen, da dieser Punkt vorher nicht ausreichend sondiert werden kann. Deshalb ist festgelegt, dass in diesem Fall das erste Bohrloch schrittweise jeweils um 1,0 m zu bohren und danach zu sondieren ist, um eine Anomalie zu erkennen und eventuellen Unfällen vorzubeugen. Nachdem das erste Bohrloch fertiggestellt ist, erfolgt die erste vollständige Sondierung. Dazu ist die Sonde bis auf den Grund der Bohrung abzusenken und die Kompensation durchzuführen. Danach wird die Sonde gleichmäßig aus dem Bohrloch gezogen und die Messwerte unter gleichzeitiger Aufzeichnung der Wegstrecke oder in festen Zeittakten im Datenaufnahmegerät gespeichert. Die Wegstreckenaufzeichnung führt zu einer Verringerung von Tiefen-Messfehlern und wird daher in der Praxis bevorzugt eingesetzt. Die Sonde misst alle größeren ferromagnetischen Störkörper im Umkreis um das Bohrloch. Bei Ausbleiben eines Störkörpersignals können danach die benachbarten Bohrlöcher des Rasters ohne Gefahr direkt bis in die geforderte Tiefe abgebohrt werden. Dieses Prinzip - unter Sicherheit bohren - sondieren - erneut unter Sicherheit bohren - sondieren - wird solange fortgesetzt, bis Signale an der Sonde auf das Vorhandensein eines Störkörpers hinweisen. Danach kann die Bestimmung der Lage und Tiefe des Störkörpers am Rechner vorgenommen werden (Abb. A-3.1-10). Eine auch heute noch gängige und erfolgreiche Auswertemethode wird in Wegener und Fleischmann, 1954, vorgestellt.
Bei der Drucksondierung entfällt das schrittweise Vorgehen bei der ersten Sondierung, sofern die Daten in Echtzeit ausgewertet werden.
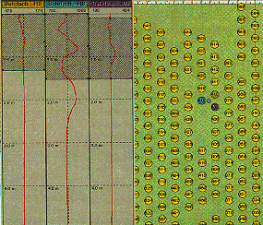
Abb. A-3.1-10: Beispiel eines Bohrlochfeldes inkl. einer Störkörperortung mit Magnetik
3.5 Luftgestützte Erkundung
Erkundungen mit Magnetometern können auch aus der Luft ausgeführt werden. Die Magnetometer werden zu diesem Zweck an UAS (unmanned aircraft system) bzw. Drohnen der geringen Gewichtsklasse von < 20 kg montiert. Dabei kommen handelsübliche Fluxgate-Magnetometer zur Messung der Totalintensität zum Einsatz. Diese weisen geringe Abmessungen bei gleichzeitig geringem Gewicht auf. Weil die Entfernung des Sensors vom Boden gegenüber derjenigen bei der Messung zu Fuß deutlich erhöht ist, ist die Messung der Totalintensität aus der Luft derjenigen des Vertikalgradienten vorzuziehen, da hierbei die Signalstärke einer Anomalie nur mit der 3. Potenz der Entfernung abnimmt gegenüber der 4. Potenz bei den Vertikalgradienten. Sinnvollerweise wird eine Anordnung von mehreren Magnetometern eingesetzt, die in einem Abstand von ≥ 25 cm angeordnet sind, um eine größere Spurbreite und gute Abdeckung der Messung zu erzielen.
Von besonderer Bedeutung ist die Einhaltung einer konstanten Messhöhe möglichst nahe an der Geländeoberfläche. Es sollten mindestens 50 cm angestrebt und die Distanz von 1 m nicht überschritten werden. Im gleichen Sinne soll bei der Befliegung die laterale Abweichung der Position der Messsensoren nicht mehr als 20 cm betragen.
Bei der luftgestützten Erkundung kommt der Stabilität des Flugs eine entscheidende Bedeutung zu. Die absolvierte Flugleistung ist zu dokumentieren. Die Messspuren müssen eine möglichst geradlinige und vollständige Abdeckung des Untersuchungsgebiets zeigen. Auch das konstante Einhalten der Flughöhe über Gelände und die Positionsgenauigkeit sind nachzuweisen. Zur Flughöhe ist die Variabilität anzugeben, ihre Standardabweichung sollte nicht größer als 20 % sein.
Sinnvolle Einsatzgebiete der luftgestützten Erkundung sind größere Freiflächen, besonders wenn diese schwer begehbar sind, wie bspw. durchnässte Ackerflächen, Moore oder das Wattenmeer. Auch auf Truppenübungsplätzen und anderen Flächen mit weiträumigem Kampfmittelverdacht kann eine Befliegung sinnvoll sein, sofern dort nicht allzu viel Vegetation oder andere Hemmnisse für eine störungsfreie Befliegung vorkommen. Einschränkungen bestehen auf Grund des vergrößerten Abstands der Sensoren von der Bodenoberfläche und des zum Vergleich zur landgestützten Messung größeren lateralen Abstands der Sonden und Messspuren. Aus diesem Grund ist eine luftgestützte Erkundung mit Magnetometern nicht geeignet zur Detektion von Kampfmitteln kleineren Kalibers.

Abb. A-3.1-11: Luftgestützte Magnetik an einem Deich (Foto: Krummel)
4 Messergebnisse
4.1 Erscheinungsformen der Störgrößen
Ein ferromagnetischer Gegenstand als Störkörper wirkt für die magnetischen Feldlinien des Erdfeldes wie ein guter magnetischer Leiter, d. h. die Feldlinien versuchen den geringsten magnetischen Widerstand zu finden und ihren Verlauf so zu verändern, dass sie durch den Körper verlaufen (vgl. Abb. A-3.1-12b). Eine Ausnahme bilden dabei aufmagnetisierte Körper, d. h. Körper, die schon sehr lange im Boden liegen. Diese bilden im Laufe der Zeit einen eigenen Nord- und Südpol aus. Da aber die Feldlinien der Erde auf der Nordhalbkugel zum magnetischen Südpol gerichtet sind, werden sie durch den Nordpol des Störkörpers verdrängt (vgl. Abb. A-3.1-12c).
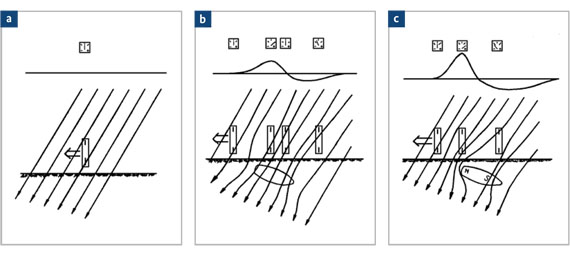
Abb. A-3.1-12: Feldlinienverlauf und Störgrößen: a) ungestörtes Feld, b) ferromagnetischer Störkörper, c) aufmagnetisierter ferromagnetischer Störkörper
Die Störungen des Erdmagnetfeldes verteilen sich an der Erdoberfläche und bestehen meist aus einem positiven und einem negativen Bereich (s. a. Abb. A-3.1-3). Abb. A-3.1-13 bildet die Anomalienform eines magnetischen Einzelkörpers bei einer flächenhaften Vermessung ab. Zusätzlich sind drei ausgewählte Spuren (Profile) dargestellt.
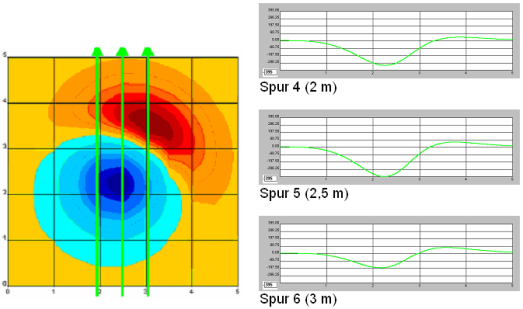
Abb. A-3.1-13: Anomalie eines Störkörpers und drei ausgewählte Spuren
Abb. A-3.1-14 zeigt das Ergebnis einer Feldmessung, bei der ein geplantes Neubaugebiet vermessen wurde. Auf der Fläche sind unterschiedliche Erscheinungsformen von Anomalien zu erkennen. So treten Dipole (positive und negative Werte) auf. Die Richtungsachsen der Dipole sind unterschiedlich orientiert - ein Hinweis darauf, dass die Anomalien nicht allein durch induzierte, sondern auch durch remanente Magnetisierung hervorgerufen sein können. Ebenso sind Anomalien mit rein positiven Werten zu sehen. Hier kann es sich um senkrecht im Untergrund stehende längliche Körper handeln.
Zum Einsatz kam bei der Messung ein Gradiometer (FM36, Geoscan Research), der Spurabstand betrug 0,5 m. Man beachte, dass die größte Anomalie (Bildmitte oben) nur ca. +14 nT/m aufweist. Insgesamt ist das Untersuchungsfeld als magnetisch ruhig einzustufen, in dem vereinzelt isolierte Einzelkörper auftreten. Eine Auswertung des Feldes ist in Abb. A-3.1-18 zu sehen.
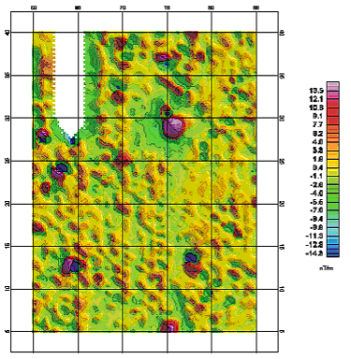
Abb. A-3.1-14: Feldmessung mit einem Gradiometer auf einem geplanten Neubaugebiet, Größe der Fläche: 25 x 35 m. Deutlich sind markante Einzelanomalien zu erkennen, die auf singuläre Störkörper im Untergrund hinweisen (geoFact GmbH).
Bezüglich der Lage eines magnetischen Störkörpers ergeben sich folgende Erkenntnisse über die Anomalienform:
Ein waagerecht im Boden liegender Störkörper erzeugt ein charakteristisches Signal, das aus einem positiven und einem gleich großen und gleich langen negativen Anteil besteht.
Das Signal eines geneigten Körpers dagegen weist Verzerrungen auf, wobei meist der Teil des Körpers, der der Erdoberfläche näher liegt, ein stärkeres Signal hervorbringt. Als Extremfall erzeugt ein senkrecht im Boden liegender Körper je nach Aufmagnetisierung nur ein positives oder negatives Signal (Abb. A-3.1-15).
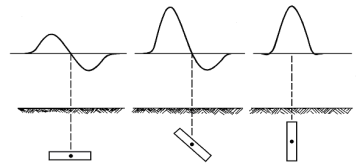
Abb. A-3.1-15: Signalformen in Abhängigkeit von der Lage des Störkörpers
Nach einer magnetischen Feldaufnahme müssen die Daten zur Interpretation aufbereitet werden.
4.2 Datenbearbeitung magnetischer Messungen, Zuordnung der Messwerte zu Koordinaten
Bei einer flächenhaften Datenaufnahme müssen die Messwerte mit ihren Raumkoordinaten verknüpft werden. Moderne Datenlogger verfügen über entsprechende Eingabemöglichkeiten, um die im Feld aufgenommenen Messwerte einem (lokalen) Raumkoordinatennetz (X-/Y-Werte) zuzuordnen. Dabei werden meist rechteckige Untersuchungsflächen ausgepflockt und spurweise im Zick-Zack-Verfahren abgelaufen/abgefahren.
Die Auslösung der Sonde zur Aufnahme eines Messwertes erfolgt manuell durch Tastendruck oder quasikontinuierlich (z. B. 40 Messwerte pro Sekunde). Bei einer quasikontinuierlichen Aufnahme erfolgt die Zuordnung der Messwerte auf die Ortskoordinaten durch Anfangs-, (Zwischen-) und Endmarken auf den Profilen. Zwischen diesen Marken werden die gemessenen Werte linear auf äquidistante Entfernungsintervalle (z. B. 10 cm) interpoliert. Werden nur Anfangs- und Endmarken gesetzt, muss die Sonde entlang des Profils mit konstanter Geschwindigkeit bewegt werden, um eine genaue Zuordnung zu erreichen. Besser ist die Verwendung von Zwischenmarken, z. B. alle 1,0 m. Hierzu werden kommerziell Positionierungssysteme angeboten, die sowohl für Oberflächen- als auch für Bohrlochmessungen eingesetzt werden können.
Kommt es bei der Hin- und Rückmessung durch unterschiedliche Sondenpositionen zu einem unbeabsichtigten systematischen Versatz der Messwerte für die Hin- und Rückmessung, muss dieser Positionierungsfehler im Nachhinein korrigiert werden.
Bei RTK-DGPS-Systemen erfolgt die Zuordnung der Messwerte zu den aktuellen Ortskoordinaten automatisch mithilfe einer entsprechenden Software. Dies ist ein großer Vorteil gegenüber anderen Positionierungssystemen, da die Messungen nicht unmittelbar an Profile oder Messgitter gebunden sind. Demgegenüber steht, dass das Verfahren eine „direkte Sicht zu den Satelliten“ benötigt und daher in bewaldeten und städtischen Gebieten in der Regel nicht die erforderliche Genauigkeit von unter einem dm erreicht. Weiterhin ist der Aufwand für kleine Flächen gegenüber „landgestützten“ Positionierungssystemen unwirtschaftlich.
Beim Einsatz von GPS ist darauf zu achten, dass der GPS-Sensor und der Magnetiksensor/das Magnetik-Sensorarray in der Projektion auf die Erdoberfläche immer den gleichen Bezug haben. Im Idealfall stehen GPS-Sensor und Magnetik-Sensor senkrecht übereinander.
Nullabgleich, Driftkorrektur
Gradiometer müssen vor Beginn einer Messung einem Nullabgleich an einem magnetisch ungestörten Punkt unterzogen werden. Bei der Verwendung eines Arrays muss dies für alle Einzelgradiometer geschehen. Trotzdem kommt es vor, dass Einzelspuren bei der Messung einen konstanten Offset untereinander aufweisen. Dieser Offset muss dann im Nachhinein softwaremäßig korrigiert werden.
Weiterhin unterliegen Magnetometer einer Drift, die z. B. durch Temperaturschwankungen während der Messungen verursacht wird. Dabei nehmen die Messwerte kontinuierlich leicht ab oder zu. Werden Teilfelder an unterschiedlichen Tagen aufgenommen und im Nachhinein zu einem Gesamtfeld zusammengesetzt, können daher Sprünge/Kanten an den Grenzen von einem Teilfeld zu einem anderen Teilfeld auftreten. Ursache hierfür ist z. B. ein unterschiedlicher Nullabgleich (Abb. A-3.1-16a zeigt diesen Effekt). An der Grenze von Teilfeld 1 zu Teilfeld 2 tritt ein Sprung auf. Zusätzlich ist zu erkennen, dass die Messwerte innerhalb eines Teilfeldes einer Drift unterliegen. Gemessen wurden die Profile immer von unten nach oben. In diesem Falle ist eine stetige leichte Zunahme der Messwerte zu erkennen. Abb. A-3.1-16b zeigt die Messwerte nach der Korrektur. Dazu wurde jedes Teilfeld für sich mit einem gleitenden Mittelwert in Profilrichtung korrigiert. Deutlich erkennt man die Verbesserung. Die beiden Teilfelder befinden sich auf gleichem Niveau, ebenfalls ist der zeitlich bedingte Sprung korrigiert. Andere Ursachen für Sprünge in den Messdaten können auch Stöße gegen das Instrument während einer Messung sein.
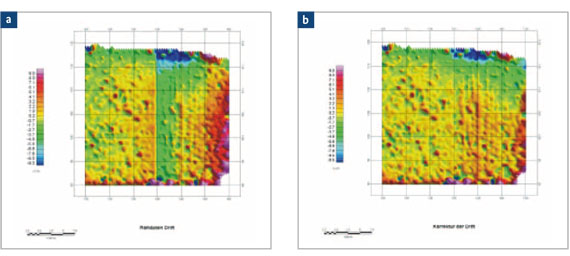
Abb. A-3.1-16: Bearbeitung magnetischer Daten durch Nullabgleich und Driftkorrektur, a) Zwei zusammengesetzte an unterschiedlichen Tagen gemessene Teilfelder, b) Die gleichen Teilfelder nach Nullabgleich und Driftkorrektur.
Unterdrückung „magnetischer Schatten“ („2D-Filterung“)
Spundwände, Kaimauern, stahlbewehrte Gebäude oder andere große Eisenkörper können störende Effekte ("magnetische Schatten") hervorrufen. Ihre Anomalien erreichen oft große Werte und maskieren die Anomalien kleinerer (gesuchter) Objekte. Abhilfe kann hier eine "2D-Filterung" der Messdaten schaffen. Große Objekte erzeugen im Gegensatz zu kleinen Objekten Anomalien mit deutlich größerer Halbwertsbreite. Durch Filterung lassen sich diese Anomalien unterdrücken, so dass die kleineren Anomalien deutlicher zum Vorschein kommen. Die optimalen Filterparameter müssen durch einen erfahrenen Auswerter für jede Messung individuell bestimmt werden.
4.3 Interpretation magnetischer Anomalien
Anhand der Anomalienform lassen sich folgende Aussagen über einen Körper im Untergrund ableiten:
- Richtung des Körpers innerhalb der Fläche,
- Neigung im Erdreich,
- Tiefe,
- Volumen/scheinbares Gewicht (dies sind aus dem gemessenen Dipolmoment abgeleitete Schätzgrößen).
Qualitativ können bereits anhand der Anomalienform erste Aussagen gemacht werden (s. Abb. A-3.1-15).
Quantitative Aussagen basieren auf der Auswertung der Halbwertsbreite der gemessenen Anomalien, der Messung des Anomalienfeldes in unterschiedlichen Höhen bzw. auf einer vollständigen Inversion des flächenhaft erfassten Anomalienfeldes.
Zur Ermittlung der Tiefe eines Störkörpers stehen dem Geräteführer im Feld verschiedene Möglichkeiten zur Verfügung:
- Tiefenermittlung nach der Halbwertemethode in Nord-Süd-Richtung,
- Tiefenermittlung nach der Halbwertemethode ohne Beachtung der Nord-Süd-Richtung
sowie
- Tiefenermittlung durch Messung in zwei unterschiedlichen Höhen und Verwendung eines entsprechenden Auswertealgorithmus,
- vereinfachte Tiefenermittlung bei kleinen Störkörpern in Oberflächennähe.
Die Auswertung der Halbwertsbreite liefert schnell eine erste Abschätzung über die Tiefenlage des Störkörpers. Im Folgenden wird kurz das Prinzip erläutert:
Für einen magnetischen Störkörper in Form eines horizontalen Zylinders gilt, dass sich die Tiefe aus der Halbwertsbreite der magnetischen Anomalie ermitteln lässt. Die Halbwertsbreite ist dabei die horizontale Entfernung zwischen dem Maximum (oder Minimum) der Anomalie und dem Punkt, wo der Wert exakt der Hälfte des Maximums (oder Minimums) entspricht (Abb. A-3.1-17). Diese Regel gilt nur für einfache Störkörper wie eine Kugel oder einen horizontalen Zylinder. Das Maximum (oder Minimum) der Anomalie befindet sich dabei direkt über dem Störkörper.
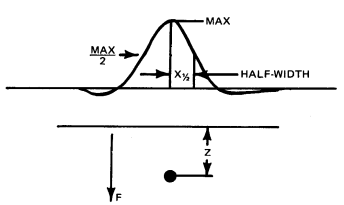
Abb. A-3.1-17: Bestimmung der Tiefe einer Kugel / eines horizontalen Zylinders aus der Halbwertsbreite der magnetischen Anomalie, z = 2 X ½ (aus Breiner, 1973).
In der Praxis wird die Tiefe eines Störkörpers meistens nach der Halbwertemethode ohne Berücksichtigung der Nord-Süd-Richtung ermittelt, da sie relativ einfach und zeitsparend ist und ausreichend genaue Ergebnisse liefert.
Eine weitere einfache Abschätzung ergibt sich durch die Messung des Magnetfeldes in zwei unterschiedlichen Höhen. Unter der Annahme eines Dipolfeldes gilt für die Totalfeldanomalie:
|
|
Durch Division der beiden Gleichungen und anschließender Auflösung nach z ergibt sich:
 |
Eine ähnliche Berechnung lässt sich für zwei Gradiometer in zwei unterschiedlichen Höhen herleiten. Der Vorteil dieser Abschätzungen liegt darin, dass keine Kenntnisse über die Größe des magnetischen Momentes M des Störkörpers notwendig sind.
In der Praxis sind die Ergebnisse aus den Abschätzungsformeln meist mit hohen Fehlern behaftet. Ursache ist die Messwertstreuung der Felddaten, so dass bei der Tiefenberechnung aus nur 2 Messwerten der Fehler entsprechend groß werden kann. Ebenso müssen die Minimal-/Maximalwerte der Anomalien durch die Feldmessungen direkt erfasst werden, d. h. das Messpunktraster muss dicht genug sein.
Kommerziell angebotene Programme schalten zur Störkörpermodellierung eine Datenbearbeitung vor und berücksichtigen bei der Tiefenberechnung unter der Annahme eines magnetischen Dipolfeldes das vollständig flächenhaft erfasste Anomalienfeld.
Ein praxiserfahrener Geräteführer ist in der Lage, anhand der Störsignale Aussagen über die Größe und Tiefe eines Störkörpers vorzunehmen. So erzeugt z. B. ein kleiner Störkörper an der Erdoberfläche ein kurzes kräftiges Signal, welches nach Anheben des Gerätes um nur wenige cm nicht mehr wahrnehmbar ist. Ein großer Störkörper in der Tiefe von einigen Metern dagegen zeigt nur einen geringen Messwert von einigen nT, erstreckt sich dafür aber über mehrere Meter. Er kann sehr leicht durch kleinere Störungen in der Nähe der Erdoberfläche vollkommen übersehen werden. Oft ergibt sich auch die Überlagerung von zwei oder mehreren Signalen, die als Einzelkörper nicht wahrgenommen werden. Daraus leitet sich eine grundsätzliche Forderung ab, dass nach der Bergung eines Fundes unbedingt eine Nachkontrolle zu erfolgen hat.
Tiefenbestimmung aus Störkörpermodellierung:
Magnetische Anomalien von Fundmunition können aufgrund der magnetischen Vorgeschichte (Herstellung, langes Liegen im Boden, verschiedene Formen) sehr komplex sein, so dass das Modell eines einfachen Dipols zur Störkörpermodellierung unzureichend ist. Um dieses Problem anzugehen, können die Anomalien über die Berechnung des sog. analytischen Signals ausgewertet werden. Im Ergebnis erhält man eine Lokalisierung, Tiefenbestimmung und Größenschätzung des verborgenen Störkörpers (Spurgeon et al.). Die einzelnen Bearbeitungsschritte für diese Methodik werden in Tab. A-3.1-4 aufgelistet und kurz erläutert:
|
1. Interpolation der Messdaten auf ein Rechteckgitter (bilinear) 2. Bestimmen des totalen Magnetfelds und der horizontalen Ableitungen 3. Berechnen des analytischen Signals 4. Markieren und Editieren der Targets 5. Bestimmen der Targetinformationen |
Im ersten Schritt werden die Messdaten auf ein Rechteckgitter interpoliert. Im zweiten Schritt wird aus der vertikalen Ableitung das totale Magnetfeld integriert und daraus die horizontalen Ableitungen berechnet. Integration und Ableitungen erfolgen nach Fouriertransformation über Filter im Frequenzbereich. Aus den drei orthogonalen Ableitungen kann im dritten Schritt durch vektorielle Addition das analytische Signal bestimmt werden, welches als Einhüllende der „magnetischen Energie“ beschrieben werden kann und allein von der Entfernung zur magnetischen Quelle abhängig ist. Das analytische Signal ist in der Abb. A-3.1-18 "Analytisches Signal mit Tiefenbestimmung" für die Felddaten von Abb. A-3.1-14 dargestellt. Die Maximalwerte ("Peaks") der Anomalienfelder bestimmen die XY-Position der magnetischen Quellen ("Targets") exakt.
Die Tiefenbestimmung der Targets erfolgt über die Lösung der Eulerschen Homogenitätsgleichung (Yaghoobian et al., 1992). Wie bei allen Potentialverfahren ist die Störkörpermodellierung mehrdeutig, da nicht unterschieden werden kann, ob die Größe des magnetischen Störkörpers oder seine Entfernung zur Messlokation die gemessenen Anomalienwerte bewirkt. Im hier verwendeten Lösungsverfahren wird ein sog. Strukturfaktor N vorgegeben und dann die Tiefe sowie das scheinbare Gewicht des Targets berechnet. Der Strukturfaktor N gibt an, mit welcher Potenz das magnetische Feld mit der Entfernung abnimmt. Für eine magnetische Kugel beträgt N = 3, für einen Zylinder/ein Rohr N = 2. Ein guter Wert für Fundmunition ist N = 2,7, wenn keine weiteren Informationen über die Geometrie des Störkörpers vorliegen.
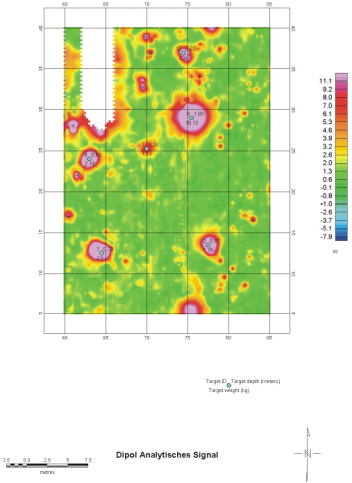
Abb. A-3.1-18: "Analytisches Signal mit Tiefenbestimmung" für die Felddaten von Abb. A-3.1-14. Die Maximalwerte ("Peaks") der Anomalienfelder bestimmen die XY-Position der magnetischen Quellen ("Targets") exakt.
Wenn der vorgegebene Strukturfaktor richtig gewählt wurde, hängt die Genauigkeit der Tiefenbestimmung noch vom Messpunktabstand und der Messgenauigkeit ab. Ist der Strukturfaktor des Targets kleiner als vorgegeben, werden Tiefe und scheinbares Gewicht überschätzt. Für einen zu groß vorgegebenen Strukturfaktor gilt entsprechendes. Tests mit verschiedenen Strukturfaktoren zeigen Variationen von bis zu 50 % in der Tiefenberechnung. Beschränkt man sich aufgrund der Vorgaben auf Strukturwerte, die magnetische Störkörper aus Eisen mit unbekannter Form, aber räumlicher Ausdehnung bzw. zylinderförmige Körper und Fässer beschreiben, ergeben sich Variationen von 20 % in der Tiefenberechnung. Die Unsicherheit für einen zylindrischen Störkörper liegt bei 10 %.
Abb. A-3.1-18 zeigt die Ergebnisse der Objektidentifizierung sowie die Berechnung der zugehörigen Tiefe und des scheinbaren Gewichtes. Tab. A-3.1-5 gibt die Objektliste wieder. Auffällig ist hier das Objekt mit der Target_ID 9, das in einer Tiefe von ca. 1,9 m mit einem scheinbaren Gewicht von ca. 19 kg liegt. Alle anderen Objekte sind wesentlich leichter und liegen im oberen Meter.
|
UXO |
- |
Targetliste |
|||||
|
X |
Y |
Target_ID |
Mag_Depth |
App_weight |
Bkgrd_fld |
Depth_err |
XY_err |
|
[m] |
[m] |
[m] |
[kg] |
[%] |
|||
|
64,5 |
12,5 |
1 |
0,76 |
2,57 |
4,7 |
5,83 |
0 |
|
77,5 |
13,5 |
2 |
0,87 |
1,78 |
-5,69 |
4,61 |
0 |
|
83 |
16,5 |
3 |
0,76 |
0,3 |
-1,12 |
5,64 |
0 |
|
60,5 |
17 |
4 |
1,04 |
0,76 |
3,25 |
4,48 |
0 |
|
61,5 |
22 |
5 |
0,7 |
0,33 |
4,26 |
7,52 |
0 |
|
63 |
24 |
6 |
0,8 |
2,19 |
1,1 |
4,67 |
0 |
|
70 |
25,25 |
7 |
1,28 |
1,13 |
1,59 |
3,69 |
0 |
|
61 |
28 |
8 |
0,69 |
0,78 |
-0,69 |
4,79 |
0 |
|
75,5 |
29 |
9 |
1,93 |
19,13 |
-0,06 |
4,86 |
0 |
|
69,5 |
32,75 |
10 |
0,89 |
0,55 |
0,56 |
12,22 |
0 |
|
76,5 |
34 |
11 |
0,97 |
0,44 |
1,88 |
4,83 |
0 |
|
70,5 |
37 |
12 |
0,77 |
0,29 |
1,37 |
4,01 |
0 |
|
74,5 |
37 |
13 |
0,93 |
1,24 |
2,59 |
5,14 |
0 |
|
70 |
39 |
14 |
0,83 |
0,5 |
1,9 |
7,58 |
0 |
Filter: Fehler < 6%, Apparent weight < 1 kg
|
64,5 |
12,5 |
1 |
0,76 |
2,57 |
4,7 |
5,83 |
0 |
|
77,5 |
13,5 |
2 |
0,87 |
1,78 |
-5,69 |
4,61 |
0 |
|
63 |
24 |
6 |
0,8 |
2,19 |
1,1 |
4,67 |
0 |
|
70 |
25,25 |
7 |
1,28 |
1,13 |
1,59 |
3,69 |
0 |
|
75,5 |
29 |
9 |
1,93 |
19,13 |
-0,06 |
4,86 |
0 |
|
74,5 |
37 |
13 |
0,93 |
1,24 |
2,59 |
5,14 |
0 |
4.4 Möglichkeiten und Grenzen der Anwendung
Eisendetektoren sind beim Einsatz zur Flächensondierung gut geeignete Geräte. Ihre hohe Empfindlichkeit ermöglicht es, je nach ihrer Masse Störkörper in diesen Tiefen zu orten. Dabei spielt bei der Erkennung tief liegender Körper die Oberflächenbelastung eine große Rolle, da die Signalgrößen mit der Tiefe stark abnehmen. Wenn die Sondenhersteller sogar mögliche Suchtiefen bis zu 6 m angeben, bedeutet das aber praktisch, dass im Oberflächenbereich keine Störungen vorhanden sein dürfen.
Das folgende Nomogramm (Abb. A-3.1-19) kann als erster Anhalt zur Abschätzung der zu erwartenden Störwirkung von Einzelobjekten in Abhängigkeit von Masse und Tiefenlage dienen.
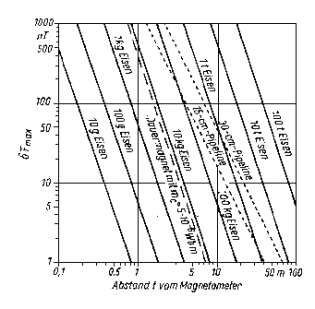
Abb. A-3.1-19: Nomogramm zur Abschätzung der maximalen Störwirkung dFmax von Eisenobjekten mit mc = 5 * 4 π * 10-8 Wb m je Kilogramm nach Breiner (1973), entnommen aus Knödel et al. 1997. Beachte: dFmax kann sich in Abhängigkeit von der Härte des Eisens, der Inklination sowie der Lage des Vektors der remanenten Magnetisierung um den Faktor 5 ändern.
Aus dem Nomogramm ist zu entnehmen, dass das Anomalienfeld eines Störkörpers (hier Absolutfeld) mit 100 kg Eisen in 5 m Tiefe an der Erdoberfläche maximal 50 nT beträgt.
Befinden sich an der Erdoberfläche viele dicht beieinander liegende Störkörper wie z. B. Eisenschrott oder stahlarmierter Bauschutt, ist in der Regel eine Einzelanomalieauswertung nicht mehr möglich. Durch die Überlagerung mehrerer Anomalien resultiert eine Gesamtanomalie, die nicht mehr interpretierbar ist. Ebenso werden die Anomalien tieferliegender Störkörper maskiert.
Prinzipiell kann man sagen, dass die Methode der Flächensondierung eine hohe Qualität der Räumung gewährleistet. Nachteilig wirkt sich aus, dass vorher keinerlei Angaben über die Belastung der Fläche bekannt sind. Dieser Mangel kann dadurch behoben werden, dass die Fläche vor Ort in Augenschein genommen wird und Probesondierungen und Probeangrabungen vorgenommen werden oder von Teilstücken bzw. der Gesamtfläche eine Datenaufnahme gemacht wird (s. auch A-3.1.3 „Verfahrensoptimierung“). Auf dieser Grundlage kann entschieden werden, ob eine Verdichtung der magnetischen Kartierung sinnvoll ist.
Bei der Störkörpersuche können zwei Vorgehensweisen unterschieden werden. Bei der Flächensondierung – auch „mag and flag“-Methode genannt – läuft ein Sondenführer die Fläche streifenförmig ab. Tritt ein Signal auf, wird die Stelle sofort markiert. Bei einer computergestützten Datenaufnahme/-auswertung wird zunächst die gesamte Fläche abgemessen. Im nächsten Schritt werden die Daten ausgewertet und die Geländekoordinaten der Störpunkte bestimmt.
Zusätzlich besteht die Möglichkeit, Tiefe, Lage im Raum und das Gewicht/Volumen der Störkörper zu bestimmen. Zum Abschluss werden die Störpunkte im Feld ausgepflockt.
Das erste Verfahren bietet sich bei stark belasteten Flächen mit kleinkalibriger Munition und Splittern bis 0,6 m Tiefe an, da hier sowieso eine mehr oder weniger flächenhafte Bergung erfolgen muss. Der Nachteil der „mag and flag“-Methode besteht darin, dass eine direkte Dokumentation bzw. Qualitätskontrolle der Messungen im Nachhinein aufgrund fehlender Datenaufzeichnungen nicht möglich ist. Bei Unsicherheiten über das erzielte Ergebnis muss die Verdachtsfläche erneut sondiert werden.
Bei oberflächennah schwach belasteten Flächen mit einzelnen tieferliegenden Störkörpern wie z. B. Blindgängern bringt die computergestützte Datenaufnahme Vorteile. Durch mehrkanalige, zum Teil fahrzeuggestützte und mit GPS-Positionierung versehene Systeme können wirtschaftlich große Flächen mit der erforderlichen Profil- und Messpunktdichte vermessen werden. Eine nachgeschaltete Auswertung der Anomalien ermöglicht eine genaue Störkörpermodellierung, womit Kriterien für eine Auswahl der Verdachtspunkte geschaffen werden. Damit reduziert sich die Zahl der zu überprüfenden Punkte, die im Gelände ausgepflockt werden müssen, zum Teil deutlich. Weiterhin ist eine Dokumentation der Sondierungsarbeiten lückenlos gewährleistet und es besteht für Dritte die Möglichkeit, Auswertung und Interpretation nachzuvollziehen und ggf. zu überarbeiten, ohne eine erneute kostenträchtige Feldmessung vorschalten zu müssen.
In letzter Zeit haben sich Ingenieurbüros der Aufgabe gestellt, im Auftrag Ausschreibungen vorzubereiten, die Qualität der laufenden Räumarbeiten zu dokumentieren und die Abnahme der geräumten Flächen durchzuführen.
5 Beispiele
Ortung einer Fliegerbombe (100 lb) auf einem ehemaligen Militärgelände
Auf einem ehemaligen Militärgelände war aufgrund von Vorinformationen die ungefähre Lage einer Fliegerbombe aus dem Zweiten Weltkrieg bekannt. Mithilfe verschiedener geophysikalischer Verfahren wurde im Verdachtsbereich eine flächenhafte Kartierung durchgeführt. Zum Einsatz kam u. a. ein Gradiometer vom Typ Vallon 130x mit dem Datenaufnahmegerät MC1. Die Positionierung erfolgte mit dem System SEPOS® der Firma Vallon.
Die Messdaten wurden mit Hilfe des Programmes oasis montaj UX-detect der Firma Geosoft ausgewertet. Als Ergebnis erhält man eine Liste aller detektierten Störkörper mit den zugehörigen Ortskoordinaten, Tiefen und scheinbaren Gewichten.
Abb. A-3.1-20 zeigt einen Screenshot während der Auswertung mit dem verwendeten Programm. Zu sehen sind links das analytische Signal und rechts die Targetliste. Das geplottete Profil unten zeigt die Tiefenverteilung der gefundenen Targets.
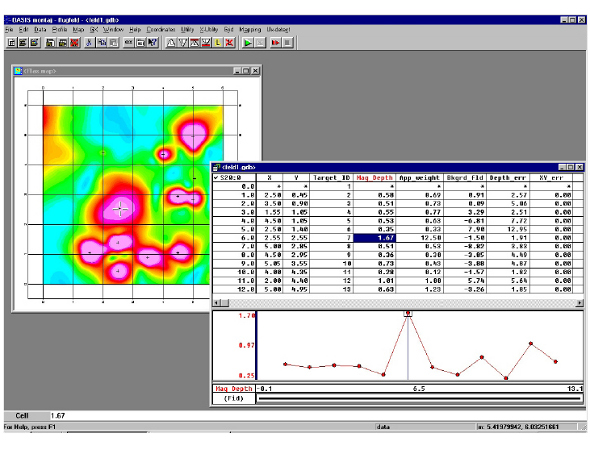
Abb. A-3.1-20: Auswertung einer Gradiometermessung zur Ortung einer Fliegerbombe auf einem Flugfeld (100 lb-Bombe, 1,5 m Tiefe, liegend).
Die Auswertung ergibt unterhalb der Untersuchungsfläche 11 kleinere Objekte, die sich im oberen halben Meter befinden. Nur ein Objekt befindet sich in ca. 1,7 m Tiefe und besitzt im Vergleich zu den anderen Objekten ein hohes scheinbares Gewicht. In Abb. A-3.1-21 ist das geborgene Objekt zu sehen. Dabei handelt es sich um eine 100 lb-Bombe, die sich horizontal liegend in ca. 1,5 m Tiefe befand.

Abb. A-3.1-21: Geborgene Fliegerbombe (100 lb) (Foto: Krummel)
Das gleiche Objekt wurde aus Vergleichsgründen erneut in die Tiefe von 1,5 m eingebracht, jedoch in gekippter Lage (ca. 45° gegen die Horizontale) und erneut vermessen.
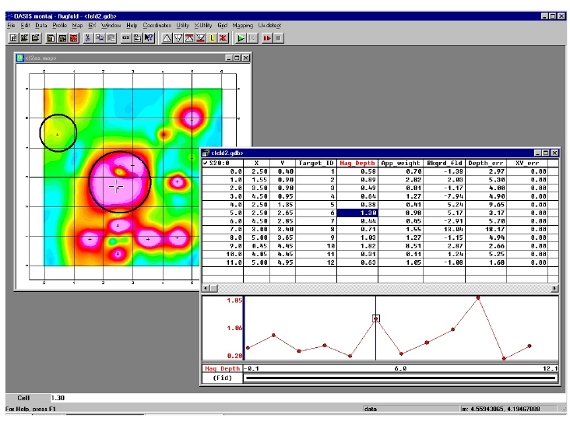
Abb. A-3.1-22: Auswertung einer Gradiometermessung zur Ortung einer Fliegerbombe auf einem Flugfeld (100 lb-Bombe in 1,5 m Tiefe, gekippte 45° Lage).
Die automatische Auswertung zeigt wiederum mehrere kleine oberflächennahe Objekte innerhalb der ersten 0,5 m. Zwei weitere Objekte mit vergleichbarem scheinbaren Gewicht liegen in 1,3 m und 1,8 m (s. Abb. A-3.1-22). Durch einen Blick auf die Koordinaten und die dazugehörigen Anomalienformen (schwarz umkreist) erkennt man sofort, dass es sich bei dem Objekt in 1,8 Tiefe (in Abb. A-3.1-22 oben links) um eine Fehldetektion der automatischen Auswertung handelt. Die Lage der Bombe entspricht dem Objekt in 1,3 m Tiefe.
Wie im Beispiel gezeigt sind automatische Auswertungen zur Störkörpersuche sehr hilfreich und unterstützen den Auswerter stark. Eine Sichtung der Ergebnisse mit dem Abgleich „gefundene Ortskoordinaten“ und „dazugehörige Anomalie“ durch einen erfahrenen Auswerter ist aber unverzichtbar, um Fehlinterpretationen zu vermeiden.
Im Vergleich „liegend“ und „um 45° gekippt“ erzeugt die gekippte Bombe größere absolute Messwerte. Dies stimmt mit der Erfahrung überein, dass bei magnetischen Vermessungen steilstehende Bomben stärkere Anomalien als liegende erzeugen und somit auch in größeren Tiefen als im liegenden Zustand erfasst werden können. Modellrechnungen bestätigen dies.
Kartierung eines Flugfeldes
Das folgende Beispiel beschreibt die magnetische Kartierung eines Flugfeldes. Zum Einsatz kam ein Mehrkanal-Datenerfassungssystem mit EDGPS-gestützem Positionierungs- und Navigationssystem. Die Sensorik bestand aus Fluxgate-Gradiometern. Die Fläche wurde mit zwei Gradiometerreihen aus je 7 Sonden synchron in einer Geschwindigkeit von 1 m/s abgefahren. Der horizontale Gradiometerabstand betrug 0,33 m, der vertikale Gradiometerabstand 0,5 m, wobei Hoch- und Rechtswert beider Sondenreihen identisch waren.
Abb. A-3.1-23 zeigt eine Übersichtskarte der Gradiometermessung. Dargestellt sind die Ergebnisse der oberen Sondenreihe. Aus Kosten- und Zeitgründen wurde nicht die gesamte Fläche untersucht, sondern eine streifenförmige Messung durchgeführt. Hierfür wurde ein rechtwinkliges Streifengitter in Nord-Süd- und Ost-West-Richtung gewählt. Die Streifenbreite betrug 12 m, um mögliche Störkörper in der Mitte des Streifens ohne Seiteneffekte in einer Tiefenlage von 5 - 6 m erkennen zu können. Der Abstand zwischen den Streifen betrug etwa 40 m.
Die kartografische Darstellung der Anomalien im Bereich des Flugfeldes gibt einen Überblick der Störkörperverteilung im Boden. Im Zusammenspiel mit weiteren Geländebefunden, z. B. aus der hinterlegten Karte, lassen sich verschiedene Signale gut deuten. Im Nordosten zeichnet die Magnetik den Verlauf der Betonstraßen nach (Nr. 1), die mit ihren eingelassenen Stahlmatten starke Anomalien verursachen.
Linienartige Anomalien, wie sie im Zentrum und am Nordrand des Flugfeldes auftreten (Nr. 2), werden durch ferromagnetische oder stromdurchflossene Leitungen hervorgerufen. Da sich die Leitungsanomalien in den aufeinander folgenden Streifen fortsetzen, lässt sich der Leitungsverlauf gut in die nicht untersuchten Flächen interpolieren.
Im Norden des Flugfeldes finden sich an der Geländeoberfläche Betonteile mit Stahlarmierungen, die sich in der Abbildung als diffus und weiträumig verteiltes Anomalienmuster darstellen (Nr. 3).
Große Teile des Flugfeldes weisen bauschutthaltige Auffüllungen mit Störkörpern in variabler Mächtigkeit auf. Je nach Menge der gemessenen Anomalien lassen sich störkörperarme und störkörperreiche Geländepartien unterscheiden. Das Flugfeld zeigt störkörperarme Auffüllungen im Osten und Nordosten (Nr. 4) sowie störkörperreiche Auffüllungen im Westen (Nr. 5). An störkörperarmen Stellen treten Einzelsignale lokal isolierter Störkörper deutlich hervor. In der Magnetkarte des Flugfeldes sind im südöstlichen Flugfeld zwei solcher Punkte beispielhaft gekennzeichnet (Nr. 6).
Die kartografische Darstellung der Anomalien zeigt, dass die in den Streifen gemessene Störkörperdichte des Flugfeldes gut in die nicht untersuchten Flächen interpoliert werden kann. Dies belegen auch die beispielhaft untersuchten Quadrate.
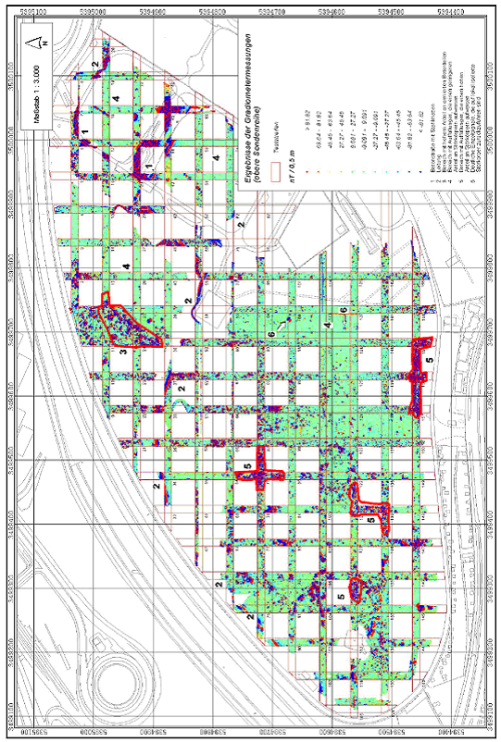
Abb. A-3.1-23: Magnetische Kartierung eines Flugfeldes